摘要:本文基于霍尔传感器输出信号幅度小、频率低、易受噪声干扰的特点,有针对性地提出一种基于高频调制方式实现的霍尔传感器读出电路。该读出电路主要包括可变增益运算放大器,高频调制电路以及1bit量化的二阶sigma-delta模数转换器。通过采用高频调制,减少电路中低频噪声以及失调的影响,同时经过放大器进行幅值放大,避免噪声混入。首先通过MATLAB建模仿真确定设计所需参数,然后基于SMIC0.18Ixm混合信号CMOS工艺完成整体电路设计。经测试,电路在3.3V电源电压,1kHz信号带宽以及256kHz时钟频率下,经过后仿真得到信噪比(SNR)为83.12dB,可满足设计的要求。
关键词:尔传感器读出电路;高频调制电路;可变增益放大器;调制器
0引言
随着霍尔传感器广泛应用于电子、医疗、器械等各个方面,对其输出信号进行准确采集变得至关重要。经研究发现,在3.3V电源电压,±0.4T磁场强度条件下,霍尔传感器输出信号范围在±150mV之间。而在通常应用中,霍尔传感器大多处在较小的磁场里,一般为mT数量级,因此霍尔传感器的输出信号较小,容易受到外界环境的干扰,需要对输出信号进行放大处理。同时,基于输出信号频率较低的特性,需要采用低频噪声抑制电路来降低噪声对信号带来的影响。*后以模数转换器作为信号进行数据转换与精度测量的模块也是不可缺少的。
国外对于读出电路的研究已经较为成熟,而国内近些年来也有较大发展,如上海华虹、中国科学院微电子所以及中国科学院大学在读出电路设计方面都有相应成果,本文在这些研究基础上加入噪声抑制电路,进一步改善读出电路的性能。
霍尔传感器读出电路的设计如图1所示,主要由对信号进行放大的可变增益放大器以及对信号进行转换的模数转换器组成。其中,为避免低频噪声和失调的影响,在设计中加入了高频调制结构,将噪声和失调转移到信号带宽之外,以改善整体电路性能。
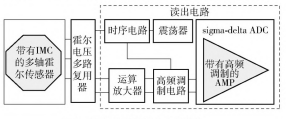
图1霍尔传感器读出电路结构
本文详细介绍了读出电路芯片的设计,对电路的基本理论与架构进行研究与分析,完成从Simulink建模,电路设计到版图布局各个环节,*终进行后仿真,实现目标要求。
1整体电路建模
从读出电路基本理论与架构出发,基于MATLAB平台对于整体电路结构进行模型仿真。如图2所示,框图由上到下分别为基于高频调制的可变增益运算放大器,sigma—delta调制器以及降采样数字滤波器。具体流程如下:可变增益运算放大器根据输入信号幅度大小自动选择合适的放大倍数进行信号放大。放大后的信号由sig-ma-delta调制器进行积分量化,转化为1bit的数字信号,然后经过后级降采样数字滤波器的滤波和抽样过程,输出高精度的数字码。
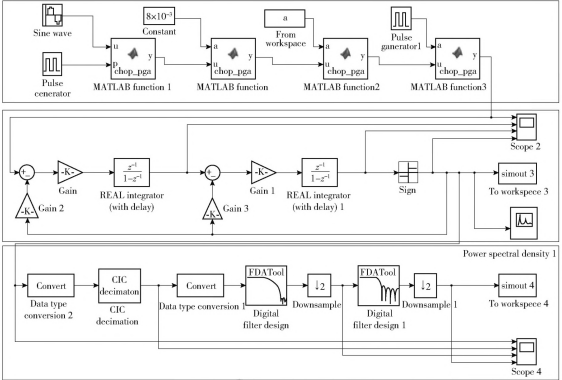
幽2读出电路的MATLAB模型
该设计提出在运算放大器的输入与输出节点加入高频调制电路,其目的主要是将运放产生的1/f噪声和失调调制到信号带宽之外,然后在滤波器的作用下滤除掉,避免噪声和失调对低频小信号产生影响。因此高频调制电路的功能主要是完成对噪声信号的调制。由傅里叶级数可知:假设P是周期为TP占空比为50%的方波信号。傅里叶系数设为PK。由此可以得到:
(1)

若将噪声的功率谱密度(PSD)设为Sn(w),则经过一次调制的噪声功率谱密度Sn(w)可以表示为:
(2)

由式(2)可以得出:噪声频谱Sn经过一次调制被转移到斩波信号P的奇次谐波上,因而削弱了信号基带内的噪声。而在高频调制电路模型搭建过程中,高频调制电路的频率应满足:
(3)

其中,K≥2,BWsignal为信号带宽,fcorner,为噪声角频率。
而对于调制器的设计,则应先确定其噪声传输函数。因为调制器的功能相当于低通的模拟滤波器,所以可以根据巴特沃兹滤波器的特性来对其进行分析,得到二阶单环调制器的噪声传输函数(NTF)为:
(4)
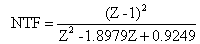
基于式(4),由调制器的架构,可以推导所需增益以及反馈因子的范围,然后带入模型进行仿真,确定合适的值。
由于sigma-delta模数转换器的整体电路是由模拟调制器和数字滤波器共同构成,调制器部分决定设计的精度,而数字滤波器部分决定设计的面积和功耗,所以在对滤波器进行设计时,可以使用CIC滤波器、补偿滤波器以及半带滤波器的组合来尽可能的降低所需的硬件开销,以减小电路的面积和功耗。
考虑实际电路设计中各种非理想因素如:KT/C噪声、时钟抖动、运放的有限增益、带宽压摆率以及开关非线性等的影响,确定模型中各个参数的指标。*终得到仿真结果如图3所示,信噪比达到84.2dB,达到预期74dB的设计目标。
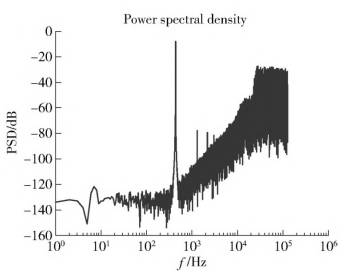
图3MATLAB模型仿真结果
2关键单元电路设计
2.1高频调制电路
高频调制电路作为降低电路噪声及失调的关键模块,其内部开关的结构如图4(a)和图4(b)所示。
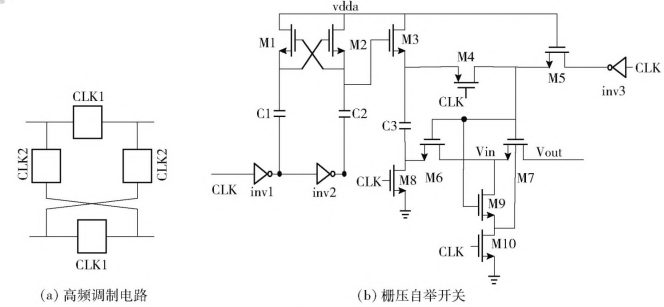
图4关键电路
由图4(a)可知,在高频调制电路中,随着时钟信号的交替变化,能够选通不同的信号路径,实现信号与方波相乘的功能。其中,对于方框中电路的选取只需要考虑信号能够无损失传输即可。很简单的情况是使用单个NMOS管来实现开关的功能,但是由于单个NMOS管做开关存在非线性以及阈值电压变化的问题,会在电路中引入谐波失真,影响电路性能。所以本设计采用栅压自举开关的结构,如图4(b)所示,当CLK为高电平时,M7管截止,M3和M8管导通,使得c3两端的电压为电源电压;当CLK为低电平时,M3和M8管关断,M4和M6导通,此时,M7也处于导通状态且栅源电压为C3两端的电压,因此与输入信号的大小无关。即增加了开关导通电阻的线性度。同时栅压自举开关的使用一方面避免了单个开关导通时电阻较大的问题,另一方面也降低了时钟馈通等因素的影响。
2.2可变增益运算放大器
由上述sigma-delta模数转换器的模型结构可以验证,在满摆幅范围内,随着输入信号幅度增加,模数转换器的峰值信噪比(PSNR)也会增加,但是接近满摆幅时,会引起调制器中后级积分器出现过摆幅的现象,从而在输出引入大量谐波,使得PSNR下降。所以尽量选择合适的信号幅值输入。而霍尔传感器处在不同磁场中,输出信号幅度不同,这就使得通过转换器转换得到的精度产生很大差异。所以该设计在霍尔传感器和模数转换器之间加入可变增益的运算放大器,一方面可以放大前端电路输出的小信号,另一方面又可以调节自身输出信号幅度以适应后级模数转换电路的要求,结构如图5所示。
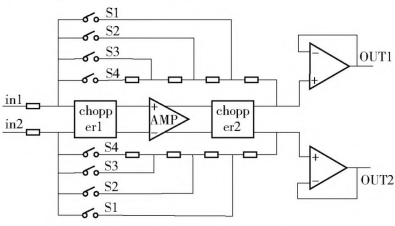
图5可变增益运算放大器
在设计中,为保证电路稳定性,运放采用闭环结构。根据不同输入信号的幅度大小,由数字电路控制选取不同的开关闭合,然后通过电阻比值对信号进行相应倍数的放大。其中对于阻值的选取,要考虑版图的布局,以减小电阻失配误差带来的影响。此外,设计中加入了高频调制电路,使得运放产生的1If噪声和失调移到高频端,以降低信号带内噪声。如图6所示,虚线和实线分别为不加调制电路与加入调制电路的运放等效输入噪声的仿真结果,由图6可以看出,高频调制电路**地抑制了低频噪声。
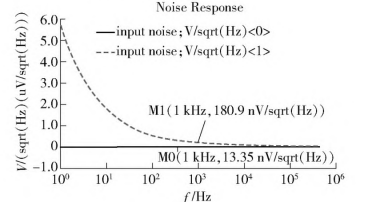
图6不加与加入凋制电路的运放等效输入噪声波形

